Team SPACE
10918
Who are we, and what is FTC?
We are Team SPACE, we are best described as a team with limited expierence and a lot of rookies.
FIRST Tech Challenge (FTC) is a global robotics competition for students aged 12–18. Teams work together to design, build, and program robots, then compete in alliance-based matches. With help from mentors, students build STEM skills, learn teamwork and “Gracious Professionalism,” and go for awards. Every September, a brand-new challenge is revealed to kick off the season.
Partners








The FTC Benelux Championships are a key moment in the season and unfortunatly we didn’t get any tickets to a premier event or worlds, so our off-season has begun. We thank you for your support.
Programming
Our programming team consists of three members who develop and maintain the software that controls our robot. At the start of the season some of our programmers were still new to Java, so we began by using Blocks to learn the basics. As we gained more experience, we gradually transitioned to Java, which we now use for all of our robot code.
To develop and test our programs, we use FTCsim, a simulation environment where we can try ideas and practice programming before using the real robot. This helps us learn new techniques and solve problems even when the robot is not available.
One of our main goals is creating a reliable autonomous program, where the robot performs tasks on its own during the autonomous period. Because our robot uses a mecanum drive, precise programming is required to control movement in all directions. By continuously testing and improving our code, we work to make our robot more accurate and reliable throughout the season.
Engineering
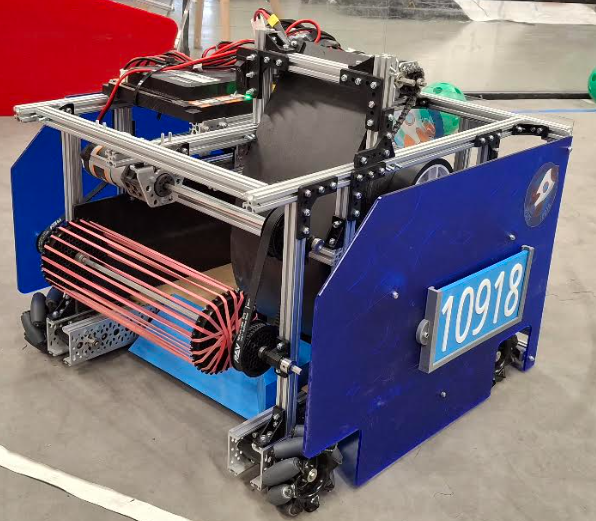
Our engineering team is responsible for designing, building, and improving our robot throughout the season. After our first qualifier, we realized that our robot needed major improvements. The shooter was not consistent and balls often got stuck, which could stop the robot from working during a match. Because of this, we decided to redesign the robot from scratch, keeping only the drivetrain.
During the winter break we held a large brainstorming session at Breda Robotics, one of our sponsors. There we discussed different design ideas and looked at other robots for inspiration. Eventually we chose a design with a ground intake, a transfer system using DUO Flap Wheels, and a flywheel shooter.
Throughout the build process we faced several challenges. For example, our shooter sometimes launched artifacts in random directions. We solved this by adding side plates and guide strips to create a more controlled path. Our intake also required improvements, so we tested multiple prototypes and adjusted the ramp position and curve. By continuously testing and improving our design, we worked to make our robot more reliable and effective during matches.
Outreach
Outreach is all about connecting with other teams, sharing our passion for robotics, and having fun together. One of our priorities is fun—we want every team member to enjoy being part of SPACE. Last season we released Space Game 2, a survival video game made by our former team member Rick, and we even created a teaser trailer for it. We also went to the Minecraft movie as a team to celebrate the end of the season and enjoy some time together.
This season we launched a new social media campaign called #First_around_the_world, aiming to connect teams from all over the globe. We reached out to around 100 teams from countries like France, Brazil, Romania, and Kazakhstan, asking them to share stories and photos of their teams.
We also connected with five teams for meetings on topics like CAD, Outreach, and programming, including Initum Robotics #21063, Team Polaris #18340, and Team Hazmat #13201. These collaborations were great learning experiences and we plan to continue building international connections.
On social media, we started posting more regularly on Instagram, reaching 1,000 followers. We use our channels to share team updates, skits, and connect with other teams, and we hope to grow our reach even further in the future.